پسورد فایل :
www.electrical4u.ir
KeiluVision MDK-ARM 5.17

شرکت Keil یکی از تولیدکنندگان و توسعهدهندگان قدیمی و برتر ابزارها و نرمافزارهای مربوط به صنایع الکترونیکی و بهشکل خاص، تولید ابزارهای کامپایل، عیبیابی و توسعه برای انواع میکروکنترلرها میباشد. محصولات این شرکت بهعنوان ماژول یا کامپوننت در محیط یکپارچهی برنامهنویسی µVision IDE نصب میشوند. در این محیط توسعه، امکانات کاملی از قبیل ویراشگر کد، عیبیابی و اشکالزدایی برنامه، شبیهسازی کامل و… فراهم آورده شده است. نرمافزار Keil MDK-ARM محصول اصلی این شرکت است که µVision را شامل میشود و میکروکنترلرهای دیگری مثل C251 ،C166 ،C51 بهعنوان ماژول نصب شده و قابل استفاده خواهند بود.
امکانات و ویژگیهای مجموعهابزارهای Keil :
– محیط توسعهی یکپارچه برای انجام انواع عملیات کامپایل، شبیهسازی، اشکالزدایی و…
– پشتیبانی از خانوادهی پردازندههای Cortex-M ،Cortex-R ،۸۰۵۱ ،C166 ،۲۵۱ ،ARM و…
– برنامهنویسی پیشرفتهی C و C++ در پردازندههای ARM
– امکان تجزیه و تحلیل پیشرفته
– دارای بانک کاملی از مثالها و نمونهها جهت آشنایی کاربر
– برخورداری از سیستم عامل اختصاصی RTX با قابلیت پردازش و رایانش بیدرنگ یا Real-Time
– وجود کتابخانهی گستردهای از GUIها جهت نوشتن نرمافزارهای گرافیکی
– وجود مجموعهابزارها و کلاسهای برنامهنویسی برای کار با شبکههای TCP/IP و نیز دستگاههای USB
و…
راهنمای کرک:
نسخهی مورد نظر از نرمافزار MDK-ARM را نصب کرده و µVision را اجرا نموده و از منوی File روی License Management کلیک کنید. در بخش Computer ID، CID خود را کپی کرده و در قسمت مربوطه در Keygen وارد کنید. نوع و ویرایش ابزار را انتخاب کرده و روی Generate کلیک کنید. سریال تولیدشده را در قسمت New License ID Code LIC وارد کرده و Add کنید.
برای دانلود پک های نرم افزاری برای هسته های جدید به این آدرس مراجعه کنید.
برچسبها:
برای برنامه نویسی میکرو کنترلرها دو زبان وجود دارد که خیلی پر استفاده هستند ، زبان بیسیک و زبان C . برای هر کدام از زبان ها نیز یک کامپایلر ساخته شده است . بهترین کامپایلر زبان بیسیک نرم افزار BascomAVR است. بهترین کامپایلر زبان C نیز نرم افزار CodVision می باشد. این نسخه به همراه صدها مثال برنامه متنوع در زمینه های مختلف همراه است همچنین این نسخه نسخه FullVersion می باشد و هیچگونه محدودیت استفاده ندارد. از امکانات اضافه شده در این نسخه پشتیبانی کامل و رسمی از میکروکنترلر های سری xmega میباشد و اضافه شدن کتابخانه و دستورات مورد نیاز جهت استفاده از این میکروکنترلر ها از جمله دستورات مربوط به مبدل دیجیتال به آنالوگ dac میباشد. بسیاری از مشکلات نسخه قبلی در این نسخه مرتفع شده است از جمله پشتیبانی از پروگرمر ها و چیپ های جدید. بسکام با ویندوز ویستا و Seven سازگاری کامل دارد و محصول سال ۲۰۱۱ شرکت MCS است .
برچسبها:
password: www.electrical4u.ir
http://www.electrical4u.ir/1422/codevision-avr-advanced-v3-12.html
.png)
برچسبها:

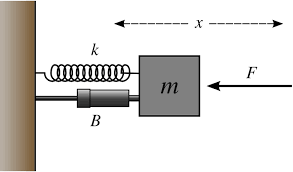
مشکل براش های ذغالی این بود که زود ساییده می شد و از کار می افتاد و همچنین دارای افت ولتاژ زیادی در حدود 1 تا 2 ولت در دوسر ذغال ها بود، اگرچه با اضافه کردن ذرات مسی در ذغال حدود 0.3 ولت کاهش می یابد اما همین موضوع سبب تولید نویز زیاد و ساییدگی زودتر براش ها می شد.
پس مشکلات موتورهای DC براش را در موارد زیر خلاصه می کنیم :
1-عمر محدود (به علت ساییده شدن و از کار افتادن زود هنگام)
2-اتصال معیوب
3-حجیم بودن
4- منبع نویزهای الکتریکی و محیطی
برچسبها:
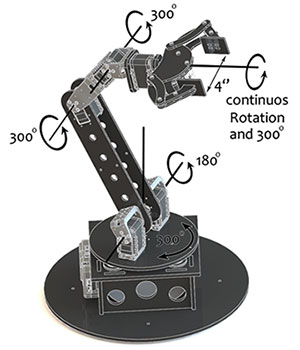
درجات آزادی ربات
.
.
.
.
همانطور که در بحث ماشین آلات داریم برای قرار دادن یک نقطه در فضا ابتدا نیاز به سه مختصه داریم
مثل x , y , z که در امتداد سه محور کارتزین هستند . برای تعریف موقعیت یک نقطه در فضا 3 مختصه لازم و
کافی است . اگر چه ممکن است این سه مختصه در انواع مختلف سیستم های مختصات بیان شوند ولی وجودشان
ضروری است . به هر حال داشتن 2 یا 4 مختصه ممکن نیست ، چون 2 مختصه برای مکان یابی نقطه در فضا
کافی نیست و 4 تا هم در سه بعد غیر ممکن است . بطور مشابه اگر شما دستگاهی سه بعدی را با 3 درجه آزادی
تصور کنید ، شما باید قادر باشید هر نقطه از آن را داخل محیط کاری ) Work Space ( دستگاه در هر موقعیت
مطلوبی قرار دهید .
برای مثال یک جرثقیل می تواند یک توپ را در هر موقعیتی در فضای کاری اش همانگونه که
اپراتور)راننده( تشخیص می دهد قرار دهد . به همین شکل برای قرار دادن یک بدنه صلب )جسم صلب سه بعدی
شامل بیش از یک نقطه( در فضا ابتدا باید موقعیت یک نقطه انتخابی روی آن را تعیین کنیم ، بنابراین برای اینکه
همانطور که میخواهیم مکان یابی کنیم نیاز به سه قسم اطلاعات داریم . اگر چه در این حالت موقعیت جسم معین
شده است برای جهت یابی جسم نسبت به نقطه انتخابی هنوز داده های زیاد و نامحدودی وجود دارد . برای اینکه
جسم را کاملا در فضا معین کنیم علاوه بر موقعیت نقطه انتخابی روی آن ابتدا لازم است جهت گیری جسم را تعیین
کنیم . یعنی برای تعیین موقعیت و جهت گیری یک جسم صلب کلا به 6 دسته اطلاعات نیاز داریم . به تعبیری برای
اینکه نقطه ای را در فضا قرار دهیم و در جهت دلخواه جهت گیری کند به 6 درجه آزادی نیاز است .
اگر درجات آزادی کمتر از 6 باشد قابلیت های ربات محدود می گردد . برای درک این مطلب یک ربات با 3
درجه آزادی را در نظر بگیرید که تنها می تواند در راستای 3 محور x , y , z حرکت کند . در این مورد جهت گیری
تعریف نشده است . تمام آنچه که ربات قادر به انجام آن می باشد اینست که چیزی را بردارد و آنرا موازی با
محورهای دستگاه مرجع حرکت دهد . جهت گیری همواره ثابت باقی می ماند . حالا ربات دیگری را با 5 درجه
آزادی تصور کنید ، قابلیتها : چرخش نسبت به 3 محور ولی حرکت تنها در راستای محور های x , y . اگر چه
ممکن است شما هر جهت دلخواهی را تعیین کنید موقعیت قطعه تنها در راستای x , y امکان پذیر است نه محور
z ها. سیستمی با 7 درجه آزادی را در نظر بگیرید چنین سیستمی راه حل منحصر به فردی ندارد .
توضیح : راه حل در اینجا یعنی روشهای قرار گیری عملگر نهایی بازوی ربات در هر نقطه از فضا که
ممکن است چنگکی با کارایی خاصی باشد.
یعنی تعدادی راه حل اضافی برای رفتن و جهت گیری در موقعیتی دلخواه در فضا وجود دارد .برای اینکه
کنترلر بداند چه باید بکند باید تعدادی تصمیم گیری اضافی در جریان عادی کار قرار گیرد که اجازه دهد فقط یکی از
راه های اضافی را برگزیند . مثلا یکی ممکن است از روند بهینه سازی برای سریعترین و یا کوتاه ترین مسیر
برای مقصد دلخواه استفاده کند . بنابراین کامپیوتر مجبور است تمام راه حل ها را چک کند تا کوتاه ترین و
سریعترین جواب را یافته و آن را اجرا کند . بواسطه این نیاز اضافی که قدرت و زمان محاسباتی بیشتری را می
طلبد هیچ گاه در صنعت رباتیک رباتی با 7 درجه آزادی به کار نمی رود .
مساله ای مشابه هم ممکن است ؛ اینکه یک بازوی رباتیک روی یک پایه متحرک نصب گردد مثل یک صفحه
متحرک )سیار( یا نوار نقاله . در این حالت ربات یک درجه آزادی اضافی دارد که بر اساس بحث قبلی کنترل آن
غیر ممکن است . ربات می تواند در موقعیت و جهت گیری دلخواهی از بین تعداد بسیاری وضعیت مشخص روی
نوار نقاله یا صفحه متحرک ) Platform ( قرار گیرد . به هر حال در این مورد اگر چه درجه آزادی زیادی وجود
دارد و معمولا درجات آزادی اضافی قابل حل نیستند اما وقتی ربات روی نوار نقاله یا جسم متحرک دیگری نصب
می شود موقعیت پایه ربات بستگی به نوار )تسمه ( یا قطعه مبنای دیگری که معلوم است دارد . از آن جاییکه این
موقعیت نیازی به تعریف توسط کنترلر ندارد درجات آزادی باقیمانده هنوز 6 تا هستند و بنابراین منحصر به فرد اند
.
تا وقتیکه موقعیت پایه ربات روی نوار یا موقعیت صفحه متحرک معلوم است نیازی به پیدا کردن آن توسط حل
معادلات حرکت ربات نیست و بنابراین سیستم حل شدنی است .
آیا می توانید تعیین کنید بازوی انسان چند درجه آزادی دارد ؟ البته به استثنای کف دست و انگشتان ولی
مچ را در نظر بگیرید ؛ قبل از اینکه ادامه دهید لطفا سعی کنید ببینیدآیا می توانید درجات آزادی را تعیین کنید .
دقت داشته باشید که بازوی انسان سه گروه مفصل در خود دارد : کتف – آرنج – مچ ؛ کتف 3 درجه آزادی دارد
قسمت بالایی استخوان بازو می تواند در صفحه ای کمانی شکل ) Sagittal ( بچرخد)موازی با صفحه وسط بدن
انسان( و نیز در صفحه تاجی ) Coronal ( = صفحه ای گسترده از یک کتف تا کتف دیگرو همینطور نسبت به
استخوان بازو .
این را با چرخاندن بازوی خود حول سه محور مختلف ببینید .
آرنج تنها یک درجه آزادی دارد چون بازو تنها می تواند حول مفصل آرنج خم و راست بشود . مچ هم سه
درجه آزادی دارد : می تواند از مرکز بدن دور شده و به آن نزدیک گردد و نیز خم و راست شود ) 2درجه( ، و چون
که استخوان شعاعی می تواند حول استخوان زند زیرین بچرخد مچ نیز می تواند در طول آن )استخوان شعاعی(
بچرخد . ) 1درجه(بنابراین بازوی انسان کلا 7 درجه آزادی دارد ، اگرچه تعدادی از حرکات بسیار کوچک به نظر
می رسد .
ازآنجاییکه سیستمی با 7 درجه آزادی راه حل منحصر به فردی ندارد فکر می کنید ما چگونه از بازوی خود استفاده
می کنیم ؟؟؟!!!
به خاطر داشته باشید که در یک سیستم روباتیک عملگر نهایی هرگز به عنوان یک درجه آزادی به حساب
نمی آید . تمام رباتها قابلیتهای اضافی دارند که ممکن است عملا شبیه به یک درجه آزادی باشد . به هر حال هیچ
حرکتی در عملگر نهایی در شمار درجات آزادی ربات محاسبه نمی شود .
مواردی موجود است که یک مفصل توانایی حرکت داشته باشد اما حرکتش کاملا کنترل شده است . مثلا یک مفصل خطی را تصور کنید که توسط سیلندری پنوماتیکی )فشار هوا( تحریک می شود )جریان دهی می شود=:
جریان = فشار هوا( که بازو در آن کاملا منبسط و منقبض می گردد اما موقعیت کنترل شده نیست و می تواند مابین
درجه آزادی به مفصل اختصاص دهیم . یعنی مفصل ½ دو حد نهایی قرار گیرد . در این مورد قرارداد این است که
می تواند فقط درموقعیتهایی در محدوده حرکتی معینی قرار گیرد . مثلا مفصلی را تصور کنید که طوری ساخته شده
0و 00 باشد . همانطور که گفتیم مفصل محدود به چند حالت ممکن شده است ، پس ،، است که فقط در زوایای 0،60
دارد. )½ یک درجه آزادی محدود)= درجه آزادی
رباتهای زیادی در صنعت وجود دارد که دارای درجات آزادی کمتر از 6 هستند . در واقع رباتهایی با درجه
4 و 5 خیلی رایج هستند . تا جاییکه نیاز به درجه آزادی اضافی نباشد این رباتها خیلی خوب کار می ، آزادی 3.5
کنند .
مثلا تجسم کنید که شما می خواهید قطعات الکترونیکی را روی برد مدار قرار دهید ، برد مدار همیشه
روی سطح کاری مشخصی تخت و خوابیده است ) Fix ( بنابراین ارتفاعش )مقدار z ( نسبت به پایه ربات کاملا معلوم است . پس برای یافتن هر موقعیتی روی برد به منظور جاسازی قطعات نیاز به دو درجه آزادی در طول
محور xها و y ها داریم . بعلاوه در نظر داشته باشید که قطعات در هر مسیری جاسازی شوند برد همواره تخت
است .دراینجا به یک درجه آزادی هم برای چرخش نسبت به محور عمودی z خواهیم داشت تا قطعات در بالای
سطح جهت گیری شود .
درجه آزادی داریم برای اینکه عملگر نهایی برای جا زدن قطعات کاملا خم شود و یا ½ هم چنین نیاز به
برای بالا آوردن ربات قبل از حرکت آنرا )عملگر نهایی / چنگک / دست افزار( کاملا جمع کند . پس جمعا به 3.5
برای جاگذاری قطعات یا جمع ½ + درجه آزادی نیاز است : 2تا برای حرکت بالای برد + 1 برای چرخاندن قطعات
کردن عملگر نهایی ) End Effector )
رباتهای جایگذاری خیلی متداول هستند و بطور گسترده در صنایع الکترونیک به کار می روند . مزیت آنها
برنامه ریزی ساده و هزینه پایین به انضمام سرعت و کوچکی آنهاست . از معایبشان اینست که اگر چه ممکن است
طوری برنامه ریزی شوند که قطعاتی را با هر اندازه روی برد و در هر مسیری قرار دهند ولیی کیار دیگیری از آنهیا
ساخته نیست . این رباتها محدود اند به اینکه 3.5 درجه آزادی داشته باشند اما با همین محدودیت طراحی می توانند
عملیات مختلفی را انجام دهند .
برچسبها: